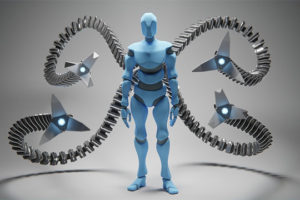
Blender 使用、ドック・オク風 ロボットアームの作成 02(※英語ムービー)
ノルウェーのアニメーションスタジオ Polyfjord 制作の Blender のドック・オク風 ロボットアームの作成チュートリアルのパート2。
> パート1 は こちら
このチュートリアルでは、Blender を使って、スパイダーマンのヴィラン、ドック・オクにインスパイアされたロボットアームにプロシージャルモーションで命を与えます。(youtube より)
00:00 Intro(はじめに)
00:37 Fixing the mesh of the joints(ジョイントのメッシュ)
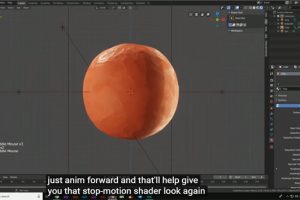
05:16 Adding procedural noise(プロシージャルノイズの追加)
07:33 Tweaking the procedural noise(プロシージャルノイズの調整)
12:00 Duplicating the robotic arm(ロボットアームの複製)
13:23 Desynchronizing the noise(ノイズの非同期化)
15:15 Replacing the motion capture(モーションキャプチャのリプレイス)
17:56 Rendering and lighting in Eevee(Eevee でのレンダリング&ライティング)
23:47 Cinematic shots(シネマティック ショット)
24:27 Thanks for watching!(ご視聴ありがとうございました!)


編集部のおすすめ:ゲームにおけるキャラクターアニメーションを学ぶには、「アサクリ」「ラスアス」のベテラン ゲームアニメーター Jonathan Cooper氏 の名著を日本語化。書籍『GAME ANIM:ゲーム開発に必要なアニメーションの知識』をおすすめします。