Blender 使用、ドック・オク風 ロボットアームの作成 01(※英語ムービー)
ノルウェーのアニメーションスタジオ Polyfjord 制作の Blender のドック・オク風 ロボットアームの作成チュートリアルのパート1。
> パート2 は こちら
このチュートリアルでは、Blender を使って、スパイダーマンのヴィラン、ドック・オクにインスパイアされたロボットアームのモデリングとリギングを行い、モーションキャプチャアニメーションを追加します。(youtube より)。
使用ソフト:Blender 3.0
使用アセット:Mixamo
00:00 Hello, Peter(やぁ、ピーター)
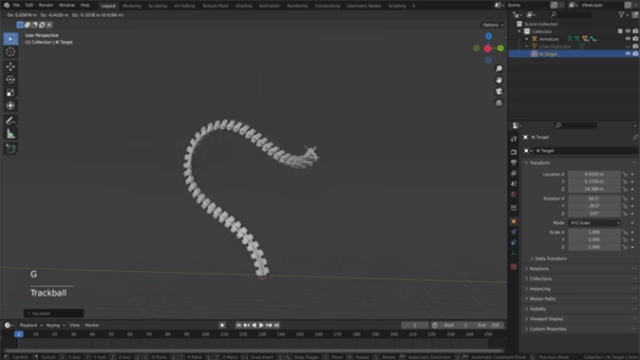
00:18 Modeling the joint segments(ジョイントセグメントのモデリング)
04:11 Creating the arm shape(アームシェイプの作成)
05:09 Rigging the arm(アームのリギング)
07:21 Inverse Kinematic setup(IKセットアップ)
09:18 Modeling and rigging the claw(クローのモデリング&リギング)
12:34 Robotic arm assembly(ロボットアームのアセンブリ)
13:17 Importing motion capture(モーションキャプチャのインポート)
14:13 Attaching the arm to the human(アームの接続)
16:19 Duplicating the arm(アームの複製)
17:16 Cinematic shots(シネマティックショット)
18:02 Limitations of the setup(セットアップのリミット)
19:59 PART 2 coming soon!(パート2 近日公開!)



編集部のおすすめ:ゲームにおけるキャラクターアニメーションを学ぶには、「アサクリ」「ラスアス」のベテラン ゲームアニメーター Jonathan Cooper氏 の名著を日本語化。書籍『GAME ANIM:ゲーム開発に必要なアニメーションの知識』をおすすめします。